[from Deep-Sea Life Issue 14]
DY109: BioCam & Autosub6000 Dancing over the Darwin Mounds
Blair Thornton1*, Veerle Huvenne2*, et al.
1University of Southampton, UK, 2National Oceanography Centre, UK
*Correspondence: B.Thornton@soton.ac.uk, viah@noc.ac.uk
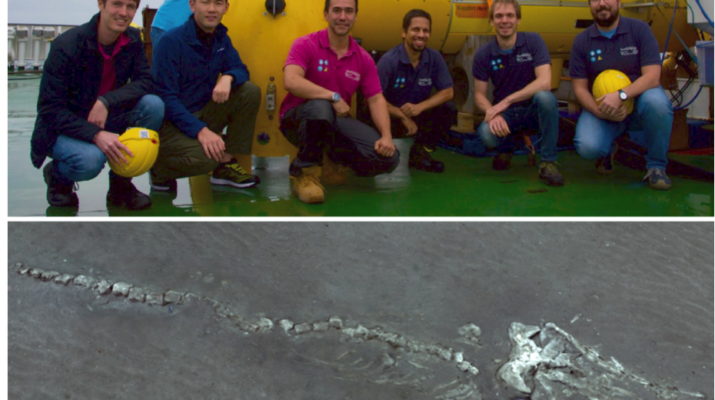
The hundreds of person hours of preparation, integration, and testing could not prevent members of the University of Southampton’s Ocean Perception team, National Oceanography Centre’s MARS group, and CLASS project crew from crossing all 1120 sets of fingers and toes onboard RRS Discovery as BioCam dived into the depths at the Darwin Mounds on NOC’s AUV Autosub6000. However, the coordinated efforts of these teams during the run up to this first deployment of BioCam did ensure that it went off without a hitch.
BioCam is a deep-sea 3D seafloor mapping system developed as part of the UK Natural Environment Research Council’s OCEANIDS programme. Although DY109 was its first deployment, BioCam builds on 10 years’ experience of deep-sea 3D imaging systems. It consists of a pair of high-dynamic range stereo cameras, a pair of LED strobes, and a pair of laser plane projectors used to gather high-resolution colour images and 3D shape information from the seafloor. The high-dynamic range and powerful illumination means BioCam can acquire data from altitudes of 5-8 m as opposed to the 2-3 m typically required for colour images. This gives BioCam a larger footprint for each image and allows flight-style AUVs like Autosub6000 to operate at faster speeds and safer altitudes. A single 24-hour deployment of Autosub6000 can cover a continuous 50-hectare region at a seafloor resolution of 3 mm, more than an order of magnitude more than typical imaging setups on hover-capable AUVs.
In addition to the large mapped areas, a key feature of BioCam is the data processing. Images are fused with vehicle navigational data to generate seamless 3D reconstructions that can be efficiently interrogated using machine learning algorithms in cruise relevant timeframes. The 3D reconstructions allow the full range of spatial scales observed to be intuitively visualised and explored, and algorithms automatically organise images by their similarity in appearance, allowing broad-scale spatial patterns to be rapidly identified.
These features, and in particular the speed with which they can be deployed, played an important role informing plans during the month long expedition and focusing our efforts in observation. Although the main aim of DY109 was to test the technology, this soon became deeply intertwined with the scientific objectives of the DY108 CLASS project, as the algorithms interrogated data during the cruise soon after it was collected, illustrating the related spatial patterns of the living cold-water corals, coral fragments, and xenophyophores. Even quickly spotting an 8 m long whale skeleton among the 100,374 images taken by BioCam on a single dive.
For information: http://www.ocean.soton.ac.uk/biocam.
For data: http://soi.squidle.org.
